| Start page of documentation | Download the code | Documentation: PDF, PS |
| Previous: Discretisation in a rectangle | Next: Additional equations for jumps |
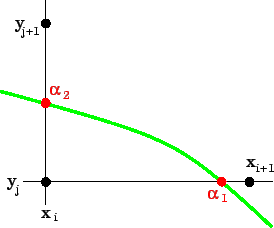
The points where the 5-point stencil is cut by the interface are called irregular points. There, the approximation (2) has to be corrected by adding so called correction terms. They can be written for each of the appearing derivatives in (1) separately.
Consider a situation like in figure above and
let
![]() be the coordinates of the
intersection point
be the coordinates of the
intersection point ![]() and
and
![]() : coordinates of the
intersection point
: coordinates of the
intersection point ![]() .
Let
.
Let
![]() ,
,
![]() ,
,
![]() ,
,
![]() . Then, the
corrected differences of second order derivatives are
. Then, the
corrected differences of second order derivatives are
In general, jump in
the mixed derivative is not used in expressions
(3-6) and
jumps in ![]() -derivatives are not used at
-derivatives are not used at
![]() -intersections, as well as
jumps in
-intersections, as well as
jumps in ![]() -derivatives are not used in
-derivatives are not used in ![]() -intersections.
-intersections.
All jumps are stored in one supervector ![]() (see
ASSEMBLE/run_ejiim.m, variable J) with ordering
(see
ASSEMBLE/run_ejiim.m, variable J) with ordering
With this, approximation of the differential operator
![]() in domain
in domain ![]() can be written as
can be written as
Matrix
![]() , in code stored in variable P is constructed
of two parts
, in code stored in variable P is constructed
of two parts
Each of
![]() and
and
![]() is constructed as
sum
is constructed as
sum
Note: Matrix ![]() depends only on the differential operator and
geometry. No dependence on boundary conditions!
depends only on the differential operator and
geometry. No dependence on boundary conditions!
Construction of the matrix
![]() is done in function
DIFFOP/corrections.m.
The interface information is stored in the structure variable IX, see
Section 3 for details.
is done in function
DIFFOP/corrections.m.
The interface information is stored in the structure variable IX, see
Section 3 for details.
Constructing of
![]() matrix
matrix
Idea: run a loop over all intersection points and check, which grid points are affected.
We know that
![]() derivative is affected only
by
derivative is affected only
by ![]() -type intersections, so the matrix
-type intersections, so the matrix
![]() has zeros in the right block, corresponding to
has zeros in the right block, corresponding to ![]() -type
intersection points.
-type
intersection points.
In a loop over all ![]() -intersections:
-intersections:
Construction of
![]() is done completely analogously,
only now zeros are in the left block of
is done completely analogously,
only now zeros are in the left block of
![]() and loop
has to be done over all intersections.
and loop
has to be done over all intersections.
In the actual version of the code, the EJIIM system is solved
by Matlab `
![]() '-operator. For larger problems, especially
three dimensional, the Schur-complement approach together with
some fast solver for inverting the operator
'-operator. For larger problems, especially
three dimensional, the Schur-complement approach together with
some fast solver for inverting the operator
![]() is highly
suggested [3,1,2].
is highly
suggested [3,1,2].
| Previous: Discretisation in a rectangle | Next: Additional equations for jumps |
![$\displaystyle \frac{1}{h_x^2}\left(u_{i+1,j}-2u_{i,j}+u_{i-1,j}\right)
-\frac{1...
...partial_x u]_{\alpha_1}
+ \frac{1}{2}(h^+)^2 [\partial_{xx}u]_{\alpha_1}\right)$](img52.png)
![$\displaystyle \frac{1}{h_x^2}\left(u_{i+2,j}-2u_{i+1,j}+u_{i,j}\right)
+\frac{1...
...partial_x u]_{\alpha_1}
+ \frac{1}{2}(h^-)^2 [\partial_{xx}u]_{\alpha_1}\right)$](img54.png)
![$\displaystyle \frac{1}{h_y^2}\left(u_{i,j+1}-2u_{i,j}+u_{i,j-1}\right)
-\frac{1...
...partial_y u]_{\alpha_2}
+ \frac{1}{2}(k^+)^2 [\partial_{yy}u]_{\alpha_2}\right)$](img56.png)
![$\displaystyle \frac{1}{h_y^2}\left(u_{i,j+2}-2u_{i,j+1}+u_{i,j}\right)
+\frac{1...
...partial_y u]_{\alpha_2}
+ \frac{1}{2}(k^-)^2 [\partial_{yy}u]_{\alpha_2}\right)$](img58.png)